一 前置环境说明
搞了一台联想的本,配置4核16G,没有NVIDIA显卡。重做系统,装上Ubuntu 20.04.3 LTS,系统和网络环境弄好,保证可以访问相关网站。要安装的Apollo版本是6.0。
二 依赖环境搭建
2.1 安装Docker
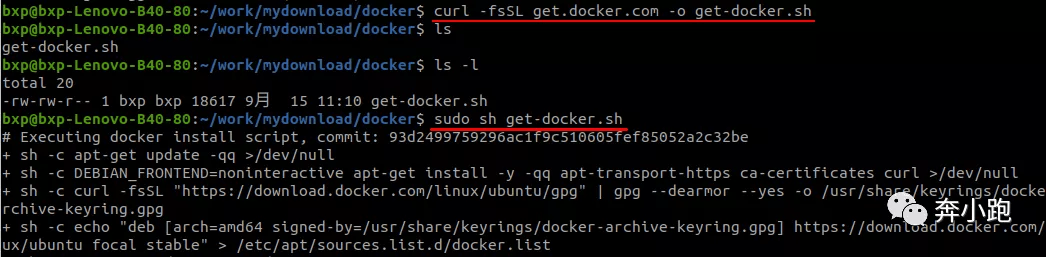
2.1.1 使用脚本自动安装
curl -fsSL get.docker.com -o get-docker.sh
sudo sh get-docker.sh
截图:
2.1.2 启动 Docker
sudo systemctl enable docker
sudo systemctl start docker
截图:

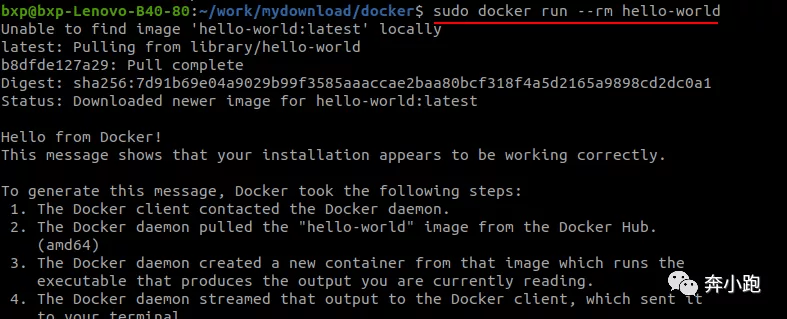
2.1.3 测试Docker是否安装正确
sudo docker run --rm hello-world
截图:
2.2 安装git和下载源码
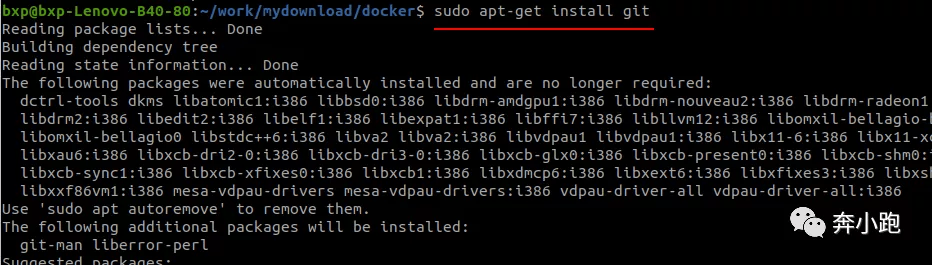
2.2.1 安装git
sudo apt-get install git
截图:
2.2.2 下载apollo源码
git clone https://github.com/ApolloAuto/apollo.git
截图:

三 apollo操作
3.1 构建apollo
3.1.1 启动apollo docker开发容器
进入apollo源码根目录,执行
sudo ./docker/scripts/dev_start.sh
截图:
......
......

3.1.2 进入apollo docker开发容器
执行
sudo ./docker/scripts/dev_info.sh
截图:

3.1.3 在容器中构建apollo
在上一步进入apollo docker开发容器后,执行
./apollo.sh build
注:此步耗时长
编译截图:

构建成功后截图:
3.2 运行apollo示例
3.2.1 启动apollo
在上一步构建完成后,执行
./scripts/bootstrap.sh start
截图:
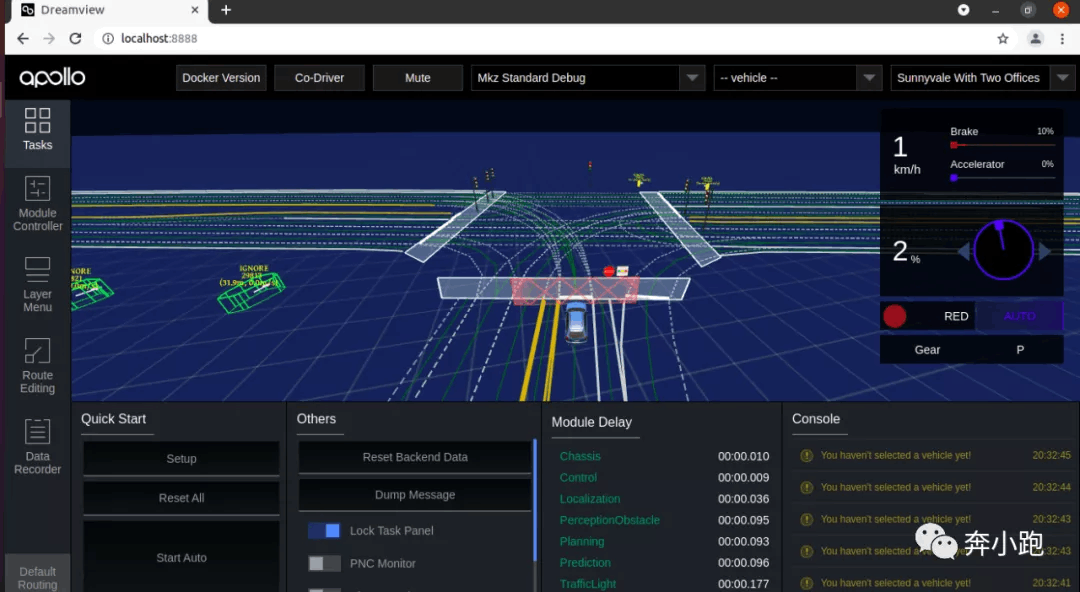
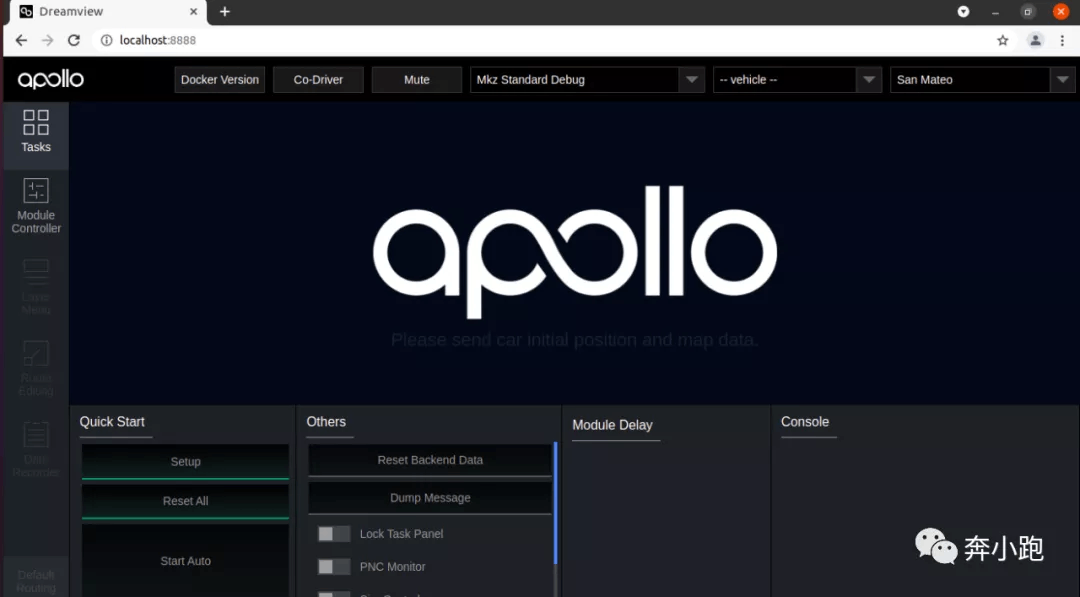
启动DreamView后,通过浏览器 http://localhost:8888 可以看到DreamView界面如下截图:
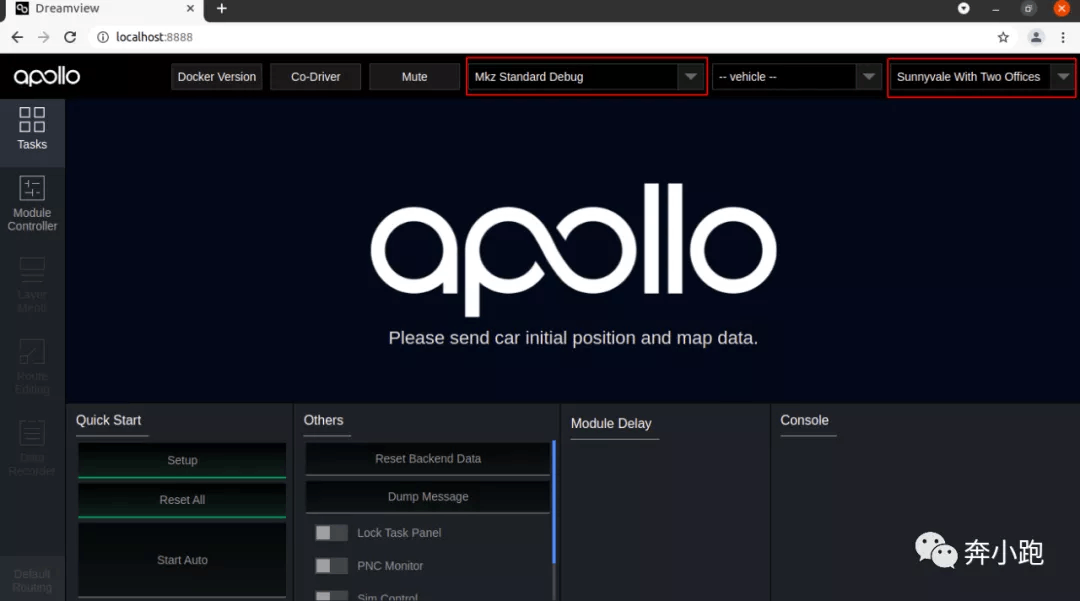
3.2.2 选择驾驶模式和地图
界面中选择驾驶模式:Mkz Standard Debug,选择地图:Sunnyvale with Two Offices,截图如下:
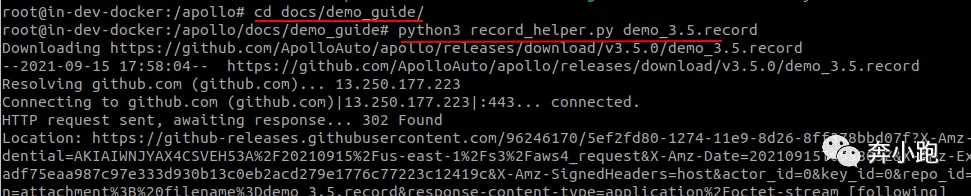
3.2.3 回放Log Demo数据
(1) 下载Demo数据
cd docs/demo_guide
python3 record_helper.py demo_3.5.record
截图:
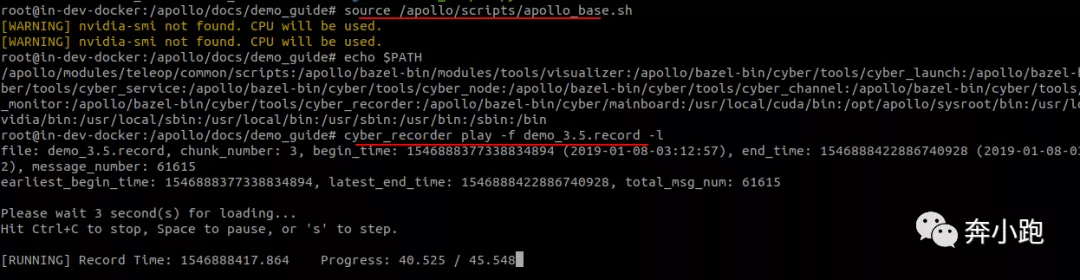
(2) 服务端播放Demo数据
进入apollo源码根目录,执行
# 环境变量
source /apollo/scripts/apollo_base.sh
# 播放数据,-l 表示循环播放
cyber_recorder play -f demo_3.5.record -l
截图:
(3) DreamView前端界面观看Log回放
回放界面中可以看到自车规划轨迹、他车预测轨迹、路网等信息